Kaj je mikrokorakanje in zakaj ga uporabljati?
Na kratko je mikrokorakanje metoda krmiljenja koračnih motorjev, ki se običajno uporablja za doseganje višje ločljivosti ali bolj gladkega gibanja pri nizkih hitrostih.
Premikanje koračnih motorjev
Koračni motorji se premikajo v diskretnih korakih ali delcih vrtljaja. Na primer, koračni motor s kotom koraka 1,8 stopinje bo naredil 200 korakov za vsak polni vrtljaj motorja (360 ÷ 1,8). To diskretno gibanje pomeni, da vrtenje motorja ni popolnoma gladko. Počasnejša kot je rotacija, manj gladka je zaradi razmeroma velikega koraka. Eden od načinov za ublažitev tega pomanjkanja gladkosti pri nizkih hitrostih je zmanjšanje velikosti korakov motorja. Tu pride na vrsto mikrokorakanje.
Krmiljenje z mikrokorakom razdeli vsak polni korak na manjše korake, da pomaga zgladiti vrtenje motorja, zlasti pri nizkih hitrostih. Na primer, korak 1,8 stopinje je mogoče razdeliti do 256-krat. To zagotavlja kot koraka 0,007 stopinj (1,8 ÷ 256) ali 51.200 mikrokorakov na obrat.
Kako poteka mikrokorakanje?
Mikrokorakanje je doseženo z uporabo pulzno-širinsko modulirane (PWM) napetosti za nadzor toka do navitij motorja. Gonilnik koračnega motorja (v našem primeru Polabs stepper motor driver) pošlje dva napetostna sinusna vala, za 90 stopinj izven faze, na navitja motorja. Medtem ko se tok v enem navitju poveča, se v drugem navitju zmanjša. Ta postopni prenos toka ima za posledico bolj gladko gibanje. Posledica je tudi bolj dosledna proizvodnja navora kot krmiljenje v celem ali polovičnem koraku.
Medtem ko so gladkost prenosa navora, gibanje pri nizki hitrosti in resonanca izboljšani z mikrokorakom, jim omejitve pri nadzoru in zasnovi motorja preprečujejo, da bi dosegli svoje idealne lastnosti. To je predvsem zato, ker se lahko mikrokoračni pogoni le približajo resničnemu sinusnemu valu. Tako ostane nekaj valovanja navora, resonanca in šum, čeprav je vsak močno zmanjšan v primerjavi z načini polnega in polovičnega koraka. Poleg tega je proizvodnja navora iz koračnega motorja z mikrokoračnim nadzorom le približno 70 odstotkov navora, proizvedenega s polnim korakom.
Mikrokorakanje se včasih šteje za dobro alternativo mehanskemu prestavljanju. Predvsem zato, ker ne povzroča zračnosti v sistemu ali zmanjša največje hitrosti sistema. Vendar pa mehansko prestavljanje pomnoži navor motorja in poveča njegovo sposobnost zadrževanja položaja.
Izračun mikrokorakov
Pomembno je, da se izognete temu, kar včasih imenujemo »prazna ločljivost«. Tu je stopnja delitve korakov (tj. ločljivost) višja od praktične za sistemske omejitve. To se najpogosteje zgodi, ko navor, ki ga ustvari mikrokorak, ni zadosten za premagovanje navora trenja komponente, ki se poganja (kot je vodilni ali kroglični vijak). Inkrementalni navor na mikrokorak je določen z naslednjo enačbo:
TINC = THFS x sin (90/SDR)
Kjer je:
TINC = inkrementalni navor, ki nastane z vsakim mikrokorakom
THFS = zadrževalni navor (delovanje v polnem koraku)
SDR = razmerje delitve korakov (število mikrokorakov na polni korak)
Za motor z zadrževalnim navorom 0,35 Nm z uporabo 256-stopenjskega delitvenega razmerja (SDR) bi bil inkrementalni navor, ki ga ustvari vsak mikrokorak, 0,002 Nm.
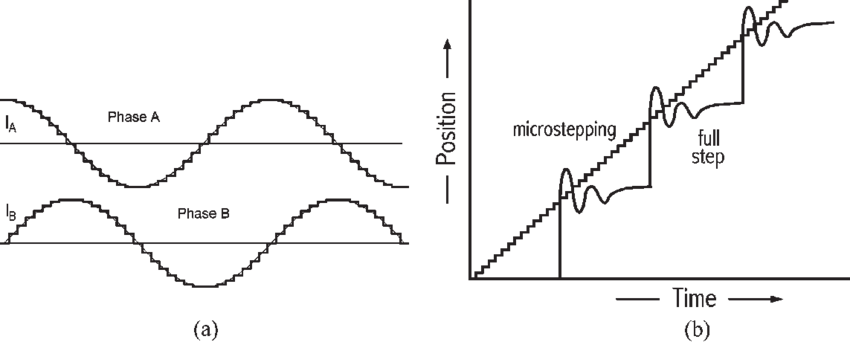
Primerjava mikrokorakanja in polnega koraka (VIR 1)
Če ima vijak torni moment 0,06 Nm, bo potrebnih 30 mikrokorakov (0,06 ÷ 0,002), da se ustvari dovolj navora, da se vijak premakne. Poleg tega delovanje z več koraki na vrtljaj zahteva višjo frekvenco za impulzni sklop, ki poganja motor. Uporaba 256 SDR v prejšnjem primeru pomeni, da motor naredi 51.200 korakov ali impulzov na obrat (200 polnih korakov na obrat x 256 mikrokorakov na korak). Pri hitrosti motorja 100 vrt/min (6000 vrt/min) je zahtevana frekvenca impulza več kot 5 MHz.
VIR (1) Researchgate